simpeg.meta.MetaSimulation#
- class simpeg.meta.MetaSimulation(simulations, mappings)[source]#
Bases:
BaseSimulationCombine multiple simulations into a single one.
This class is used to encapsulate multiple simulations into a single simulation. Each simulation and mapping pair will perform its own work, then concatenate the results together.
For each mapping and simulation pair, given a model, this first applies the mapping, then passes the resulting model to the simulation.
With the proper mappings this can be useful for setting up time-lapse, tiled, stitched, or any other simulation that can be broken into many individual simulations.
- Parameters:
- simulations(
n_sim)listofsimpeg.simulation.BaseSimulation The list of unique simulations that each handle a piece of the problem.
- mappings(
n_sim)listofsimpeg.maps.IdentityMap The map for every simulation. Every map should accept the same length model, and output a model appropriate for its paired simulation.
- simulations(
Examples
Create a list of 1D simulations that perform a piece of a stitched problem.
>>> from simpeg.simulation import ExponentialSinusoidSimulation >>> from simpeg import maps >>> from simpeg.meta import MetaSimulation >>> from discretize import TensorMesh >>> import matplotlib.pyplot as plt
Create a mesh for space and time, then one that represents the full dimensionality of the model. >>> mesh_space = TensorMesh([100]) >>> mesh_time = TensorMesh([5]) >>> full_mesh = TensorMesh([5, 100])
Lets say we have observations at 5 locations in time. For simplicity we will just use the same times from the time mesh, but this is not required. Then create a simulation for each of these times. We also create an operator that maps the model in full space to the model for each simulation. >>> obs_times = mesh_time.cell_centers_x >>> sims, mappings = [], [] >>> for time in obs_times: … sims.append(ExponentialSinusoidSimulation( … mesh=mesh_space, … model_map=maps.IdentityMap(), … )) … ccs = mesh_space.cell_centers … p_ave = full_mesh.get_interpolation_matrix( … np.c_[np.full_like(ccs, time), ccs] … ) … mappings.append(maps.LinearMap(p_ave)) >>> sim = MetaSimulation(sims, mappings)
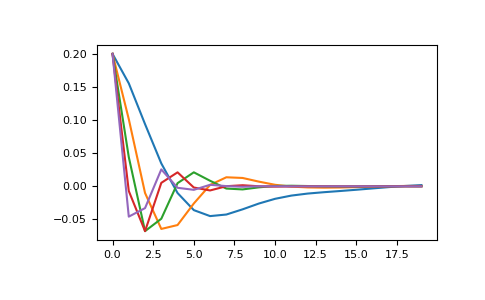
This simulation acts like a single simulation, which can be used for modeling and inversion. This model is a moving box car. >>> true_model = np.zeros(full_mesh.shape_cells) >>> speed, start, width = 0.8, 0.1, 0.2 >>> for i, time in enumerate(mesh_time.cell_centers): … center = speed * time + start … in_box = np.abs(mesh_space.cell_centers - center) <= width/2 … true_model[i, in_box] = 1.0 >>> true_model = true_model.reshape(-1, order=’F’)
Then use the simulation to create data. >>> d_pred = sim.dpred(true_model) >>> plt.plot(d_pred.reshape(5, -1).T) >>> plt.show()
(
Source code,png,pdf)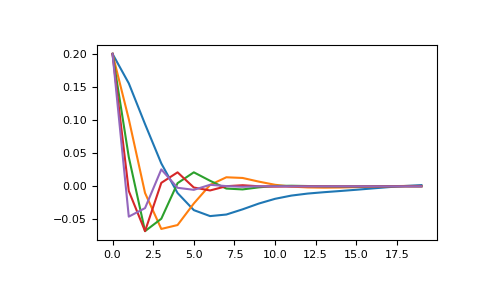
Attributes
A list of solver objects to clean when the model is updated
SimPEG
Counterobject to store iterations and run-times.A list of properties stored on this object to delete when the model is updated
The mappings paired to each simulation.
Mesh for the simulation.
The inversion model.
True if a model is necessary
Path to directory where sensitivity file is stored.
The list of simulations.
Numerical solver used in the forward simulation.
Solver-specific parameters.
The survey for the simulation.
Verbose progress printout.
Methods
Jtvec(m, v[, f])Compute the Jacobian transpose times a vector for the model provided.
Jtvec_approx(m, v[, f])Approximation of the Jacobian transpose times a vector for the model provided.
Jvec(m, v[, f])Compute the Jacobian times a vector for the model provided.
Jvec_approx(m, v[, f])Approximation of the Jacobian times a vector for the model provided.
dpred([m, f])Predicted data for the model provided.
fields(m)Create fields for every simulation.
getJtJdiag(m[, W, f])Return the squared sum of columns of the Jacobian.
make_synthetic_data(m[, relative_error, ...])Make synthetic data for the model and Gaussian noise provided.
residual(m, dobs[, f])The data residual.
{kind=link}